DYSYX-ZDJB Automatic Control Principle and Computer Control Experimental Device
Release time:2024-07-03 10:00viewed:times
1. Overview
Learning the principles of automatic control is a basic course in the teaching of automation, automatic control, electronic technology, electrical technology, precision instruments and other majors. The system provides integrated automatic control and metering instrument modules and operating software. Through the virtual PC oscilloscope function, the static and dynamic characteristics of the control system can be observed in real time and clearly, which is convenient for the study of the characteristics of the analog control system. The micro temperature control unit can replace the oven for temperature control experiments. With the control objects such as DC motors and stepper motors configured in the system, experiments in control system courses can be opened. The system can also be expanded to support simulation experimental research on modern control theories such as linear systems, optimal control, system identification and computer control.
2. The experimental platform has built-in automatic control and metering integrated instrument modules.
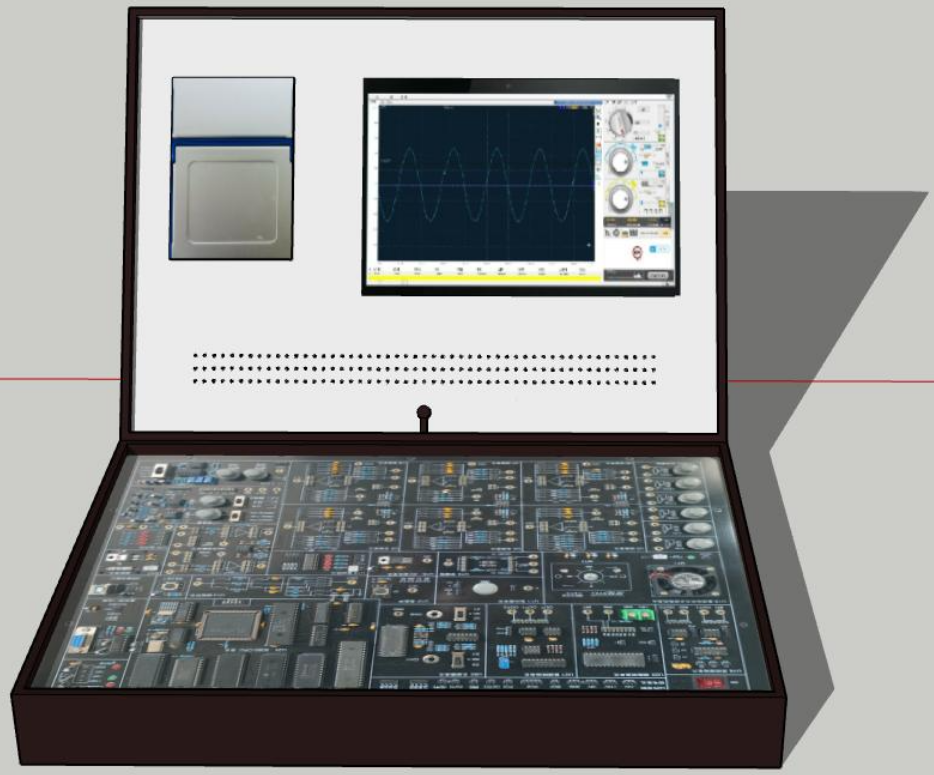
1. Integrated system, the platform is equipped with a 10.1-inch capacitive multi-touch IPS screen automatic control and metering integrated instrument module as standard.
2. Built-in more than 2 cameras, the core uses a 4-core burst frequency of more than 1.83G, and uses an interface speed of up to 400MBytes per second, and eMMC high-speed memory.
3. The integrated instrument module adopts USB2.0 communication interface, with the highest real-time sampling rate of 50M, the highest input of ±50V, supports dual-channel acquisition, full Chinese operation interface, simple and clear software operation, and powerful data analysis function.
4. Supports 72-hour upper computer paperless recorder function.
5. 8-bit ~ 13-bit vertical resolution, with built-in PWM output.
6. Supports process cache recording archiving and playback, supports waveform image import and real-time waveform comparison reference.
7. Supports 500-frame data cache and segmented storage.
8. Supports RS232, RS485, RS422, I²C and CAN, SPI, Lin decoding, and supports waveform automatic edge/extreme point measurement.
9. Supports spectrum analysis, UI characteristic curve mapping and frequency response curve mapping.
10. Integrated Pass/F*l detection function, measurement quantity historical change trend statistics and histogram analysis function.
11. Supports acquisition card mode, you can set the sampling rate and storage length by yourself, and you can also set single acquisition and cyclic acquisition.
3. Open control experimental platform
1. The experimental platform has various typical signal sources (step signal, square wave signal, ramp signal, parabolic wave signal, sine wave signal), simulation objects (eight groups of op amp units), actual objects (stepping motor, DC motor, temperature control) and other units. The circuit connection between the units and the selection of components within the units can be operated in a variety of ways, which greatly improves the experimental efficiency. The system allows users to design and develop corresponding experimental projects according to the teaching content, and supports large-scale course design and graduation design.
2. In terms of automatic control principle experiments, the system provides experimental research on time dom*n analysis method, root locus analysis method, frequency dom*n analysis method, system correction and design methods of linear control systems, and also provides experimental research content on linear discrete systems and nonlinear control systems; in addition, for the teaching of modern control theory, state space analysis experiments are provided.
3. The computer control experiment content provided by the system m*nly includes: process channel and data acquisition processing, digital program control of the system, digital PID closed-loop control, and experimental research on direct design methods of digital regulators, so that students can understand and master new intelligent control algorithms.
4. In terms of control system application experiments, the system provides two experimental objects: DC motor (fast) and temperature control (slow) to form different closed-loop systems, so that different control strategies or control parameters can be selected to obt*n the best real-time control effect.
5. Source language level integrated development environment. The system is equipped with a highly visual source language level integrated development environment for embedded control computers, which integrates control program development, debugging and experimental measurement analysis, and supports assembly source language level programming and debugging.
4. System composition 1. Automatic control integrated instrument module. 2. DICE system consists of various unit circuits, 8088CPU control unit and PC serial port for communication; 3. Signal source generating unit circuit: sine wave, square wave, ramp wave and parabola wave, the signal period is adjustable between 2 milliseconds and 30 seconds; 4. Sampler and monostable unit circuit; 5. Operation simulation unit circuit; 6. Nonlinear unit circuit; 7. Status indicator unit; 8. D/A0832 digital/analog conversion unit circuit; 9. A/D0809 analog/digital conversion unit circuit; 10. Single beat pulse generating unit; 11. Potentiometer unit; 12. -5V power supply generating unit; 13. Drive unit; 14. Motor unit; 15. DC motor, stepper motor module unit; 16. Signal measurement unit: PC software is used to realize dual-trace oscilloscope, frequency characteristic analysis and other functions. 17. Special operation link unit; 18. Variable resistor group unit; 19. Micro temperature control unit; V. Power supply parameters 1. Input voltage: 220V ±10% 2. Output voltage/current: +5V/2A, +l2V/0.2A, -l2V/0.2A VI. The experimental platform adopts a box-type structure of composite materials :
1. The box body is made of high-quality aluminum alloy frame + aluminum alloy edging + iron corner guard + ABS density board + elegant black American handle.
2. The upper and lower covers are installed with reinforced strong support hinges, and two support hinges are added on both sides. The opening and closing degree is set to 95 degrees, providing a perfect operation and display viewing angle.
3. All alloy corners are reinforced and protected with rivets, and the interior is paved with black PU fabric. The box is beautiful, sturdy and not easy to deform.
4. Wear-resistant pads and protective feet are installed on the bottom of the box, and double safety buckle locks are installed on the front.
VII . Experimental Projects
(I) Principles of Automatic Control Experimental Projects
1. Simulation Study of Typical Links
2. Transient Response and Stability of Typical Systems
3. System Correction
4. Frequency Characteristics of Control Systems
5. Typical Nonlinear Links
6. Nonlinear Systems (I)
7. Nonlinear Systems (II)
8. Sampling System Analysis
9. Correction of Sampling Control Systems
10. State Feedback (Pole Configuration)
(II) Computer Control Technology
11. A/D, D/A Conversion
12. Sample Holder
13. Digital Filtering
14. Integral Separation PID Control
15. Minimum Beat Ripple System Experiment
16. Minimum Beat Ripple-free System Experiment
17. Dalin Algorithm Control
18. Nonlinear Control
19. Decoupling Control
20. Comprehensive Control Experiment
(III) Control System Application
21. DC Motor Closed-loop Speed Regulation Experiment
22. Temperature Closed-loop Control Experiment
23. Stepper Motor Speed Regulation Experiment














 Wechat scan code follow us
Wechat scan code follow us
