戴育教仪厂内部网
Language:












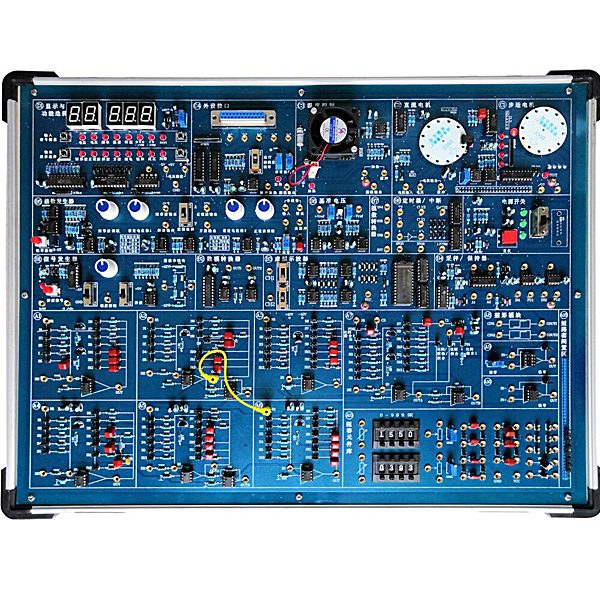


1. Composición del sistema
1. Fuente de alimentación: entrada monofásica trifilar ~220V±10% 50Hz. Salida de fuente de alimentación CC ±5V/2A, ±12V/0,5A, ambas con funciones de conexión inversa y protección contra cortocircuitos.
2. Sistema central: adopta un microprocesador 8088 para facilitar la programación del software de tecnología de control de computadora; la interfaz de bus RS232 se comunica con la computadora host (la interfaz USB se puede usar para la comunicación) y contiene los circuitos de reinicio de limpieza total y manual de la computadora host. , incluyendo bloqueo automático de cero y función de bloqueo manual de cero.
3. Generador de funciones: la máquina experimental viene con un módulo de medición de señal y visualización de señal
que puede medir el voltaje de la señal (-5V ~ +5V), frecuencia, temperatura, velocidad de rotación y otros parámetros.
4. Generador de señal de paso: generación de paso controlada manualmente (0/+5v, -5v/+5v), control de amplitud (potenciómetro) y grupo de salida no lineal.
5. Generador de señal de función: Puede emitir onda sinusoidal, onda de rampa, onda cuadrada, onda rectangular, características de relé, características de saturación, características de zona muerta y características de espacio. Tiene conmutación de interruptor y un tubo digital para mostrar información relacionada con la forma de onda. El rango de frecuencia de la señal de onda sinusoidal es 0,1 HZ ~ 2 HZ y 0,8 HZ ~ 50 HZ, y la resolución es 0,1 HZ y 1 HZ. El rango de frecuencia de otras formas de onda es 0,1 HZ ~ 250 HZ y la resolución es 0,1 HZ. El rango de amplitud de la señal de forma de onda es de -6 V ~ +6 V, la resolución de amplitud es de 0,1 V y la distorsión no supera el 0,5 %. La impedancia no es superior a 50Ω.
6. Unidad de simulación computacional: Proporciona 8 unidades de simulación de amplificador operacional básico OP07 (para uso experimental). El circuito de entrada de cada unidad tiene 6 grupos de resistencias de precisión del 0,5 % o condensadores de precisión del 5 %. El circuito de retroalimentación tiene 7 grupos de precisión del 0,5 %. Resistencias o condensadores de precisión del 5%. Consta de un condensador de precisión del 5% y un amplificador operacional. También hay una unidad de simulación de amplificador operacional ampliada, una de las cuales es el amplificador ajustable en cero, que constituye el enlace proporcional, enlace de inercia, enlace integral, enlace diferencial proporcional, enlace PID y los sistemas típicos de segundo y tercer orden; la segunda biblioteca de red de corrección puede formar varios enlaces de corrección; la tercera son 2 conjuntos de módulos de conformación.
7. Proporcione una biblioteca de componentes de resistencia y capacitancia: potenciómetros de 250 K, 500 K, 2 juegos de resistencias variables de lectura directa de 0-999,9 K y múltiples juegos de condensadores.
8. 1 juego de salida D/A: voltaje 0~5V o –5V~+5V.
9. Entrada A/D de 4 canales: 2 canales son de entrada de voltaje de 0~+5v y 2 canales son de entrada de voltaje de -5v~+5v.
10. 2 juegos de circuitos unitarios monoestables y de retención de muestras.
11. Proporcione voltaje de referencia de precisión +Vref y -Vref.
12. Unidad de temporización e interrupción: 2 juegos de contadores de temporización y 2 fuentes de interrupción.
9. Proporcionar osciloscopio virtual:
1) Entrada de señal analógica de 2 canales: visualización del plano de fase medible, amplitud-frecuencia logarítmica en el dominio de frecuencia, curva de fase-frecuencia, curva de amplitud-fase, etc.
2) Modo de visualización en el dominio del tiempo del osciloscopio: modo de visualización del plano de fase (XY) del osciloscopio; el modo de visualización de características de frecuencia del osciloscopio incluye visualización de características de amplitud-frecuencia logarítmica, visualización de características de frecuencia de fase logarítmica (diagrama de Bode), y modo de visualización de característica de fase de amplitud (gráfico de Nyquist), modo de visualización de análisis de dominio de tiempo (radianes).
3) El modo de visualización del osciloscopio controlado por computadora.
10. Objetos de control periférico
1) Control de velocidad y ángulo del motor
paso a paso (35BY48). 2) Salida de medición de velocidad de pulso del motor CC (BY25) y salida de medición de velocidad de voltaje.
3) El módulo de temperatura tiene control de entrada de ancho de pulso ajustable y calentamiento de control de entrada de voltaje, y medición de temperatura del termistor (0 ℃ ~ 76,5 ℃).
11. Apoyar el desarrollo secundario: además de la unidad de operación analógica y el generador de funciones, el temporizador 8253, el controlador de interrupciones 8259, el convertidor analógico a digital y la dirección del convertidor digital a analógico de esta máquina experimental también están abiertos a los usuarios.
12. Admite la detección automática de todo el sistema: puede ayudar a los administradores experimentales a encontrar y resolver problemas a tiempo, asegurando el desarrollo normal de los cursos experimentales de los estudiantes.
13. Chasis: marco de aleación de aluminio sólido, esquinas gruesas de plástico ABS, tamaño de contorno de referencia 480 ×. 360 × 120 mm.
14. Software de simulación virtual de educación en seguridad para capacitación mecánica : este software está desarrollado en base a unity3d. El software adopta la forma de itinerancia tridimensional y puede controlar el movimiento a través del teclado y el mouse para controlar la dirección de la lente. experimentos a distancia, experimentos con dispositivos de protección de seguridad mecánica y experimentos de seguridad mecánica. Cuando el experimento está en progreso, la pantalla itinerante tridimensional utiliza flechas y huellas para indicar al usuario que se mueva a la ubicación experimental. alrededor del objeto mecánico muestra el radio de trabajo. El proceso experimental va acompañado de un cuadro de diálogo que recuerda al robot tridimensional.
A. El contenido del experimento de distancia de seguridad mecánica incluye el experimento de distancia de seguridad para evitar que las extremidades superiores e inferiores toquen la zona de peligro (dividida en dos alturas de cerca y tamaños de apertura después de seleccionar la entrada, GB23821-2009 "Seguridad mecánica para prevenir"). Las extremidades superiores e inferiores tocan la zona de peligro" aparece frente a la cámara. Requisitos de "Distancia segura", demostración de error: el proceso experimental es que después de que el cuerpo humano ingresa al radio de trabajo del objeto mecánico y se lesiona, el rojo La pantalla y la voz indican que el cuerpo humano ha recibido daños mecánicos, regresa a la posición original y realiza el siguiente experimento. El último paso es el enfoque correcto.
B. Los experimentos con dispositivos de protección de seguridad mecánica se dividen en interruptores de enclavamiento de seguridad, cortinas de luz de seguridad, tapetes de seguridad, escáneres láser de seguridad y otros experimentos de dispositivos de protección (entrada de seguridad, control de seguridad, salida de seguridad, otros), fabricantes y lista de productos (. interruptor de bloqueo de seguridad, cortina fotoeléctrica de seguridad, alfombra de seguridad, escáner láser de seguridad, controlador de seguridad, relé de seguridad, barandilla de seguridad). Hay un recordatorio de marco azul parpadeante en la posición de instalación. Proceso experimental: seleccione la barandilla de seguridad e instálela, seleccione el interruptor de bloqueo de seguridad (o seleccione la cortina de luz de seguridad, la alfombra de seguridad, el escáner láser de seguridad) e instálelo, seleccione la seguridad. controlador e instálelo en la caja de control eléctrico , seleccione el relé de seguridad e instálelo en la caja de control eléctrico, haga clic en el botón de inicio en la caja de control eléctrico. Si ingresa a un área peligrosa, el sistema hará sonar una alarma y el objeto mecánico dejará de funcionar. Seleccione el botón de reinicio en la caja de control eléctrico para detenerse.
C. La evaluación básica del diseño de protección de seguridad mecánica requiere la finalización de la instalación del sistema de seguridad mecánico y la instalación correcta de barandillas de seguridad, interruptores de enclavamiento de seguridad, cortinas de luz de seguridad, tapetes de seguridad, escáneres láser de seguridad, controladores de seguridad, relés de seguridad. , fuentes de alimentación de 24 V, luces de señalización y botón de parada de emergencia, la evaluación se divide en diez puntos de evaluación. Algunos puntos de evaluación tienen 3 opciones, que los estudiantes eligen libremente. Después de seleccionar los 10 puntos de evaluación finales, se envían para confirmación. El sistema obtendrá automáticamente la puntuación total y la puntuación de cada punto de evaluación.
D. El software debe estar en la misma plataforma en su totalidad y no puede mostrarse como recursos separados.
E. Al mismo tiempo, proporcionamos a los clientes el paquete de instalación de realidad virtual de este software para facilitar a los usuarios la expansión a experimentos de realidad virtual y no se requiere instalación ni depuración de software.
2. Proyectos experimentales
Experimento de control automático
1. Análisis en el dominio del tiempo de sistemas lineales: 1) Estudio de simulación de enlaces típicos; 2) Respuesta transitoria y estabilidad de sistemas de segundo orden; 3) Respuesta transitoria y estabilidad de sistemas de tercer orden;
2. Análisis en el dominio de la frecuencia de sistemas de control lineal (diagrama de Bode, diagrama de Nysn): 1) Curva característica de frecuencia del enlace inercial; 2) Curva característica de frecuencia del sistema de bucle cerrado de segundo orden; -sistema de bucle abierto de orden; 4) Análisis en el dominio del tiempo de las características de frecuencia.
3. Análisis del plano de fase de sistemas no lineales: 1) Enlaces no lineales típicos 2) Sistema de control no lineal de segundo orden: 3) Sistema de control no lineal de tercer orden.
4. Corrección y retroalimentación de estado de sistemas lineales: 1) Corrección de sistemas lineales; ① corrección de derivación en serie con método de dominio de tiempo; ② corrección de retroalimentación diferencial con método de dominio de tiempo; 2) Realimentación de estado y configuración de polos de sistemas lineales.
5. Análisis del sistema de control de muestreo
6. Experimento de regulación de velocidad de circuito cerrado de motor de CC simulado
7. Experimento de control de circuito cerrado de temperatura simulada
Experimento de tecnología de control por computadora
1. Experimento de conversión digital/analógica
2. Experimento de conversión analógica/digital
3. Muestreo y retención : 1) Experimento de muestreo; 2) Experimento de muestreo/mantenimiento 3) Ejemplo de análisis del sistema de control de muestra/mantenimiento.
4. Experimentos de suavizado y filtrado digital: 1) Diferenciación y suavizado 2) Filtrado digital.
5. Experimento de control PID digital: 1) Algoritmo de control PID estándar, 2) Algoritmo de control PID de separación integral: 3) Algoritmo de control PID no lineal 4) Algoritmo de control PID compuesto de separación integral-bang bang
6. Sistema de control de mínimo ritmo: 1) Sistema con tiempos mínimos y ondulaciones; 2) Diseño con tiempos mínimos y sin ondas 3) Ejemplos de diseño de sistemas de control con tiempos mínimos.
7. Algoritmo Dalin: 1) Algoritmo Dalin con fenómeno de timbre obvio y eliminación de timbre; 2) Algoritmo Dalin con fenómeno de timbre débil y eliminación de timbre;
8. Control de desacoplamiento multivariable: 1) Diseño de control de desacoplamiento multivariable 2) Diseño de control de desacoplamiento multivariable;
9. Desarrollo secundario del control por microcomputadora.
Experimento del sistema de control
1. Experimento de regulación de velocidad de circuito cerrado del motor de CC
2. Experimento de control de circuito cerrado de temperatura
3. Experimento de regulación de velocidad del motor paso a paso
4. Experimento de control de circuito cerrado de temperatura híbrido analógico/digital.
 微信扫码 关注我们
微信扫码 关注我们

24小时咨询热线+86 18916464525

移动电话18916464525
地址:上海市松江科技园区崇南路6号A区414号厂房 备案号: 网站地图