戴育教仪厂内部网
Language:












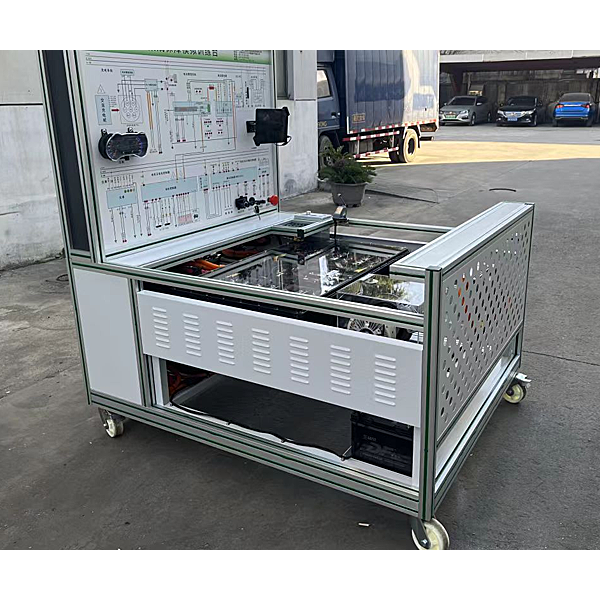


1. Introducción del producto La plataforma utiliza motores
y controladores asíncronos de CA para vehículos eléctricos puros , sistemas inteligentes de simulación de condiciones de trabajo, baterías de litio y sistemas de gestión (BMS), instrumentos, sistemas de transmisión, sistemas electrónicos de frenado hidráulico por vacío , controladores de carga simulados y cargadores. Tableros de enseñanza y otros dispositivos reales , puede completar el contenido de capacitación experimental de accionamiento eléctrico y otros sistemas integrales relacionados. Es adecuado para desmontaje, montaje y mantenimiento, cognición estructural y de principios, operación de sistemas, demostración dinámica funcional, etc. Necesidades de enseñanza de diagnóstico y detección de fallas. 2. Características funcionales 1. Batería de litio y sistema de gestión (BMS): los parámetros de la batería de energía realizan monitoreo en tiempo real, diagnóstico de fallas, estimación de SOC, protección contra cortocircuitos, detección de aislamiento, control de carga y descarga, ecualización y otras funciones, y comunicación. con el cinturón a través del bus CAN comunicación CAN cargadores de vehículos, etc. realizan el intercambio de información. 2. Paquete de batería de energía pura para vehículo eléctrico (batería de energía: batería única de litio y hierro de 3,7 V 50 Ah, un total de 20 celdas en serie. El sistema de gestión de batería incluye: módulo de adquisición de voltaje, temperatura y corriente, módulo de control principal, etc.). El módulo de control pasa a través de la red CAN. Comuníquese con otros módulos y comprenda intuitivamente la tecnología del paquete de baterías de alimentación. 3. El paquete de batería, el sensor de corriente , el relé de carga, el relé positivo total y el relé negativo total están equipados con puertos de detección, que pueden detectar las señales eléctricas de los componentes del circuito del sistema en tiempo real, como resistencia, voltaje, corriente, señales de frecuencia, etc. 4. El sistema de gestión de batería BMS tiene una función de equilibrio pasivo y protección de control de interruptor (desconexión única, cortocircuito, sobretensión, subtensión, sobrecorriente, sobretemperatura), se comunica con el cargador del vehículo a través de CAN y controla el funcionamiento del cargador del vehículo a través de BMS. , estimar SOC (estado de carga), etc. (1) Tiene recopilación de datos de voltaje único , recopilación de datos de voltaje total, recopilación de corriente y recopilación de temperatura. (2) Tiene funciones completas de alarma de nivel de falla, incluidas alarmas de voltaje, corriente, temperatura y otras alarmas de falla. (3) Tiene función de estimación de SOC. (4) Tiene función de control de carga y descarga. (5) Tiene una función de gestión pasiva del equilibrio. (6) Contactos mecánicos pasivos del interruptor del sistema . 5. La pantalla del paquete de batería (pantalla táctil de 7 pulgadas) está instalada en el panel y se pueden observar varios parámetros del proceso de carga y descarga (mostrando el voltaje y la temperatura en tiempo real de cada batería, las condiciones de descarga y carga). , corriente del bus, condiciones de aislamiento, etc.) Información de gestión), que puede mostrar la lógica de control y las reglas cambiantes de los parámetros de los componentes principales. (Compatible con el software de detección de computadora superior BMS que puede funcionar normalmente). 6. Utilice componentes reales de sistemas de transmisión de propulsión eléctrica de vehículos eléctricos puros (incluidos motores y controladores, transmisiones de una sola etapa, frenos hidráulicos de vacío electrónicos, transmisiones y otros sistemas) para lograr pruebas funcionales y capacitación experimental de sistemas de propulsión eléctrica de vehículos eléctricos, incluidos los de alta y control de baja velocidad, frenado, función de avance, función de marcha atrás, función de carga, función de enclavamiento, ajuste de carga simulada, etc. 7. Implementar pruebas funcionales y capacitación experimental para sistemas de propulsión eléctrica de vehículos eléctricos. Incluyendo resistencia CC del devanado trifásico, aislamiento fase a fase, aislamiento de tierra, capacidad de sobrecarga, características mecánicas, etc. 8. Realice el monitoreo en tiempo real y el entrenamiento experimental del sistema de propulsión eléctrica del vehículo eléctrico. El software de la computadora host puede mostrar la relación cambiante de la velocidad, el voltaje, la corriente, el par y otros parámetros del motor bajo la velocidad, aceleración y desaceleración constantes del vehículo. condiciones. 9. Sistema inteligente de simulación de condiciones de trabajo: el controlador de tensión ajustable se utiliza para simular cambios de carga y cambiar para simular diferentes condiciones de trabajo de vehículos eléctricos (arranque, ralentí, velocidad constante, aceleración, desaceleración, estacionamiento y ascenso, etc.). 10. El controlador del vehículo VCU, el controlador del motor y la unidad de control BMS tienen interfaces de diagnóstico y se puede leer la información del flujo de datos del sistema (incluido el interruptor de freno, la posición de la marcha, la velocidad del motor, el voltaje y la corriente, la temperatura del motor, el par del motor, etc.). a través del software de la computadora host, estado de funcionamiento de la apertura del acelerador electrónico, voltaje/corriente del terminal de bus, voltaje/corriente de salida del controlador del motor, recuperación de energía de frenado, etc.) y falla. contenido. 11. El instrumento multifuncional muestra la velocidad del vehículo, la velocidad de rotación, el voltaje, la marcha, la corriente, los parámetros del estado de la batería, etc. en tiempo real. Implementar capacitación en sistemas de seguridad de alto voltaje. 12. El panel está hecho de una placa de aluminio y plástico de 4 mm de espesor, y el panel instalado verticalmente está impreso con inyección de tinta UV de superficie plana con un tablero de dibujo de sistema estándar completo en color, los estudiantes pueden comparar visualmente el tablero de dibujo y el objeto real para comprender y analizar el trabajo; principio del sistema. 13. Hay terminales de detección instalados en el panel, que pueden detectar directamente las señales eléctricas de los componentes del circuito del sistema en el panel, como resistencia, voltaje, corriente, señales de frecuencia, etc. 14. La instalación de un sistema de simulación de fallas puede realizar la configuración, el diagnóstico y la resolución de fallas del sistema de circuito de bajo voltaje, y puede establecer fallas de circuito comunes. 15. El marco del equipo está construido con dos perfiles integrados de aleación de aluminio, de 40 mm × 40 mm y 40 mm × 80 mm. Es resistente al aceite, a la corrosión y fácil de limpiar. La mesa tiene 20 cm de ancho, es duradera y no se oxida. y tiene 4 ruedas giratorias con dispositivos de autobloqueo, fáciles de mover. 16. Materiales didácticos de apoyo, como instrucciones de formación práctica (experimentos), incluidos principios de funcionamiento, proyectos de formación práctica, configuración y análisis de fallos y otros puntos clave. 17. Instale dispositivos de protección de seguridad: interruptor de parada de emergencia, interruptor de alimentación principal mecánico, interruptor de mantenimiento, cubierta protectora para piezas giratorias, dispositivos de protección de seguridad de alto voltaje e indicaciones de advertencia. 18. Instale el controlador del vehículo VCU para comunicarse e intercambiar información con el controlador del motor y la unidad de control BMS a través de CAN, y lea la información del flujo de datos del sistema (incluido el interruptor de freno, la posición de la marcha, la velocidad del motor, el voltaje y la corriente, la temperatura del motor, el funcionamiento del motor). estado como par, apertura del acelerador electrónico, voltaje/corriente del terminal de bus, voltaje/corriente de salida del controlador del motor, recuperación de energía de frenado, etc., valor de voltaje del paquete de baterías, corriente de carga y descarga, temperatura, etc.) y contenido de la falla. 19. Software de simulación virtual
")
de montaje mecánico y montaje de instaladores : Este software está desarrollado en base a unity3d, con calidad de imagen opcional de 6 niveles. Está equipado con el diseño y desmontaje y montaje virtual de reductores y estructuras de ejes , diseño y simulación de comunes. mecanismos mecánicos y una biblioteca de recursos de mecanismos. Para un mecanismo mecánico típico (desmontaje y montaje virtual de un motor de gasolina), el software es un software completo y no pueden ser recursos individuales.
A. El diseño del reductor y la interfaz de desmontaje virtual pueden elegir un reductor de engranajes cónicos con engranaje helicoidal, un reductor de engranajes cilíndricos expandidos de dos etapas, un reductor de engranajes cilíndricos cónicos, un reductor de engranajes cilíndricos coaxiales, un reductor de engranajes cónicos y un reductor de engranajes cilíndricos de una etapa.
Reductor de engranaje cónico helicoidal: después de ingresar al software, el contenido del ensamblaje se reproduce automáticamente. Cada paso del video tiene una descripción de texto
. Reductor de engranaje cilíndrico expandible secundario: después de ingresar al software, el contenido se reproduce en forma de video. El contenido del vídeo debe incluir: nombre de la pieza (escanee el código QR para ver los nombres de las piezas), demostración de desmontaje y montaje (incluido el desmontaje y montaje), desmontaje y montaje virtual (incluido el general, eje de baja velocidad, eje de velocidad media, alta). -eje de velocidad, tapa de caja, asiento de caja)
reductor de engranajes cilíndrico cónico, reductor de engranajes cilíndrico coaxial, reductor de engranajes cónicos, reductor de engranajes cilíndrico de primer nivel: haga clic para ingresar y saltar automáticamente a la interfaz de dibujos. Todos los modelos son modelos tridimensionales. Al hacer clic en las piezas, se muestran los nombres de las piezas y la vista de 360° está disponible. Gire, acerque, aleje, desplace y mueva las piezas para desmontar y ensamblar todo el reductor al mismo tiempo. Seleccione el botón de inicio para volver al estado original del reductor. El reductor de engranajes cónicos y el reductor de engranajes cilíndricos de primera etapa han agregado la función de insertar una sección transversal, y la sección transversal se puede arrastrar libremente para observar la estructura interna del reductor.
B. Diseño de estructura de eje e interfaz virtual de desmontaje y montaje, reconocimiento de piezas opcionales, demostración de desmontaje y montaje y funcionamiento real.
1. Reconocimiento de piezas: modelo tridimensional y nombre de la pieza, incluido engranaje helicoidal, tapa del extremo sin orificio, acoplamiento, chaveta de acoplamiento, eje, chaveta de engranaje, tapa del extremo del orificio, manguito del eje, rodamiento rígido de bolas, cualquiera. Todas las piezas se pueden girar. 360°
2. Demostración de desmontaje y montaje: Hay 2 cajas integradas. Cuando mueve el ratón a la posición de una determinada pieza (excepto la base y el asiento del rodamiento), la pieza se ampliará automáticamente y el nombre de la pieza. Se mostrará. Está equipado con un botón de desmontaje y montaje, la función es completar automáticamente el desmontaje y montaje de la estructura del sistema del eje mediante el software. Todas las escenas tridimensionales se pueden girar, ampliar, reducir y trasladar 360° en todas las direcciones.
3. Operación práctica: Las piezas tridimensionales se colocan cuidadosamente sobre la mesa. Los estudiantes seleccionan manualmente las piezas correspondientes y las mueven a la estructura del sistema de eje. Las piezas se pueden instalar solo cuando se colocan en el orden correcto y en el orden correcto. posición correcta. Hay un botón de reinicio para facilitar que los estudiantes reinicien. Cuando mueve el mouse a una ubicación determinada de la pieza (excepto la base y el asiento del cojinete), la pieza se ampliará automáticamente y se mostrará el nombre de la pieza.
C. Diseño y simulación de mecanismos mecánicos comunes, diseño y análisis de mecanismos de cuatro barras con bisagras opcionales, diseño y análisis de mecanismos de balancín de manivela tipo I\II, diseño y análisis de mecanismos deslizantes de manivela desplazados, diseño y análisis de mecanismos de varilla guía de giro de manivela, bisagra Las cuatro El mecanismo de barra tiene una trayectoria integral, una leva de varilla de empuje de rodillo excéntrico que se mueve linealmente y una leva de varilla de empuje de fondo plano que se mueve linealmente y se centra .
1. Cada mecanismo debe poder ingresar los parámetros correspondientes, y el software puede calcular automáticamente los parámetros, realizar simulación de movimiento y dibujar curvas automáticamente.
D. La biblioteca de recursos de mecanismos incluye 11 tipos de mecanismos de enlace plano, 5 tipos de mecanismos de leva, 6 tipos de mecanismos de engranajes, 8 tipos de mecanismos de transmisión, 11 tipos de mecanismos de apriete, 6 tipos de mecanismos de tren de engranajes y 8 tipos de otros. mecanismos (simulación de equipos mecánicos)
E, desmontaje y montaje virtual de motores de gasolina, demostración de montaje y desmontaje del cárter opcional, demostración de montaje y desmontaje del cárter virtual, demostración de montaje y desmontaje del tren de válvulas, montaje virtual 1 del tren de válvulas
, demostración de montaje y desmontaje del cárter y montaje del tren de válvulas y La demostración de desmontaje tiene botón de desmontaje, botón de ensamblaje, reinicio y botón de observación de descomposición. Cuando el mouse se mueve a una determinada posición de la pieza, la pieza se ampliará automáticamente y se mostrará el nombre de la pieza. El software completa automáticamente el desmontaje y el montaje. la estructura del sistema de ejes. Cuando se utiliza el botón de observación de descomposición, el modelo 3D del cárter o sistema de distribución de gas muestra automáticamente una vista explosionada, que se puede girar, ampliar, reducir y trasladar 360°.
2. Las partes 3D del conjunto virtual del cárter y el . El ensamblaje virtual del sistema de distribución de gas está cuidadosamente organizado. Cuando se colocan en el escritorio, los estudiantes seleccionan manualmente las piezas correspondientes y las mueven al mecanismo. Las piezas se pueden instalar solo cuando se colocan en el orden correcto y en la posición correcta. Botón de reinicio para facilitar que los estudiantes vuelvan a realizar el experimento virtual. Cuando mueve el mouse a ciertas ubicaciones de piezas, los nombres de las piezas se muestran automáticamente.
3. Especificaciones técnicas
1. Dimensiones totales (mm): 1640×1300×1750 (largo×ancho×alto)
2. Dimensiones del panel (mm): 1248×898mm (largo*ancho)
3. Ruedas móviles: 150*60mm
4 . Temperatura de funcionamiento: -40℃~+50℃
5. Fuente de alimentación de entrada de carga: AC220V±10%50Hz;
6. Batería auxiliar: 12V45AH
7. Tipo de batería de alimentación: Batería de litio de hierro (batería única 3.7V50AH, 20 cuerdas)
8 Sistema de gestión del paquete de baterías (BMS): con comunicación CAN;
9. Pantalla del paquete de baterías de alimentación: pantalla táctil de 7 pulgadas;
10. Relé de alto voltaje y alta corriente: voltaje de la bobina: 12 VCC, voltaje de trabajo nominal máximo: 1000 VCC, corriente nominal: 400A;
11. Sistema de accionamiento de motor asíncrono de CA: 72 V CC 5 KW, 16 Nm, 3000 r/min, nivel de protección: IP54, refrigeración por aire natural; 12. Caja de cambios: transmisión de engranajes
helicoidales de una etapa , relación de reducción total 1:16,7; 70 decibeles; 13. Dispositivo de carga simulada: Freno de polvo magnético: PBS-20 (con controlador de tensión ajustable), par nominal: 20 N.m; 14. Controlador del vehículo (VCU): con comunicación CAN 4. Proyecto de formación práctica (experimento); 1. Método de ensamblaje y conexión del paquete de baterías de energía, estructura y principio del paquete de baterías de energía de litio, diagnóstico de fallas comunes y métodos de reparación del paquete de baterías de energía 2. Estructura interna y principio del relé de alto voltaje y alta corriente, medición de alta; relé de voltaje y alta corriente, alto voltaje y alta corriente Fallas comunes del relé y métodos de reemplazo 3. Medición del sensor de corriente, fallas comunes y reemplazo de los sensores de corriente 4. Principio y función de la estructura del interruptor de mantenimiento manual 5. Principio y función de la estructura de enclavamiento de alto voltaje ; función 6. Principio de funcionamiento y definición de pines del cargador de vehículo, fallas comunes y reemplazo de cargadores a bordo 7. Principio de funcionamiento y definición de pines del convertidor DC-DC, fallas comunes y reemplazo de la conversión DC-DC; y funciones del sistema de gestión de batería BMS; 9. Principios estructurales y funciones del sistema de accionamiento del motor, medición del sistema de accionamiento del motor, fallos comunes y métodos de solución de problemas del sistema de accionamiento del motor; 10. Principio de funcionamiento y definición de pines del pedal del acelerador electrónico, fallos comunes y; sustitución del pedal del acelerador electrónico;
11. El principio de funcionamiento y definiciones de pines de la bomba de vacío eléctrica, fallas comunes y reemplazo de la bomba de vacío eléctrica, el principio de funcionamiento y definiciones de pines del módulo del sensor de presión de vacío, fallas comunes y métodos de reemplazo del módulo del sensor de presión de vacío
12 ; Principios estructurales y funciones del sistema de recuperación de energía de frenado;
13. La relación entre los cambios de velocidad del motor, voltaje, corriente, par y otros parámetros cuando el motor funciona a una velocidad constante del vehículo.
14. La relación entre los cambios en la velocidad del motor, voltaje, corriente, par y otros parámetros cuando el motor acelera el vehículo.
15. La relación entre los cambios en la velocidad del motor, voltaje, corriente, par y otros parámetros cuando el motor desacelera el vehículo.
16. Análisis y resolución de problemas cuando el motor no gira.
17. Implantar formación práctica sobre sistemas de seguridad de alta tensión.
5. Configuración básica del
paquete de baterías de hierro y litio y sistema de gestión (con comunicación CAN, que incluye 20 celdas individuales, relé positivo total, relé negativo total, relé de carga, resistencia de precarga, sensor de corriente, interruptor de mantenimiento, fusible de alto voltaje, interfaz de carga , Interfaz de descarga, interfaz de control de bajo voltaje, módulo de adquisición de batería de energía, módulo de control principal del sistema de gestión de batería BMS, pantalla LCD de 7 pulgadas), motor de accionamiento y pieza operativa, controlador de vehículo VCU, caja de distribución de alto voltaje, conjunto de acelerador electrónico, Reemplazo del conjunto del mecanismo de engranajes, instrumento (con comunicación CAN), caja de cambios, eje de transmisión (izquierdo), mecanismo de freno de disco hidráulico de la rueda delantera (izquierda), freno de polvo magnético (1 pieza), controlador de tensión manual (1 pieza), correa de refuerzo Conjunto de bomba , conjunto de bomba de vacío, sistema de freno eléctrico de vacío, sistema de seguridad de alto voltaje, sensor de presión de vacío, conjunto de tanque de vacío, toma de carga estándar nacional y pistola de carga, cargador de vehículo (con comunicación CAN), módulo DC-DC, sistema de configuración de fallas, batería auxiliar (12V45AH), interruptor de apagado de la batería, interruptor de parada de emergencia, software de computadora host y cable de datos (prueba VCU, cargador de vehículo, motor y sistema de unidad de control de batería), banco móvil integrado con perfil de aleación de aluminio (1640×1300× 1750 mm, con dispositivo de ruedas autoblocantes, panel principal de 1248 × 898 mm con terminales de detección instalados), sistema de evaluación de fallas, instrucciones de funcionamiento del equipo.
 微信扫码 关注我们
微信扫码 关注我们

24小时咨询热线+86 18916464525

移动电话18916464525
地址:上海市松江科技园区崇南路6号A区414号厂房 备案号: 网站地图