戴育教仪厂内部网
Language:














Nota: El PLC y el convertidor de frecuencia se pueden configurar por separado o usarse con el dispositivo de entrenamiento de regulación de velocidad de conversión de frecuencia PLC.
Descripción general
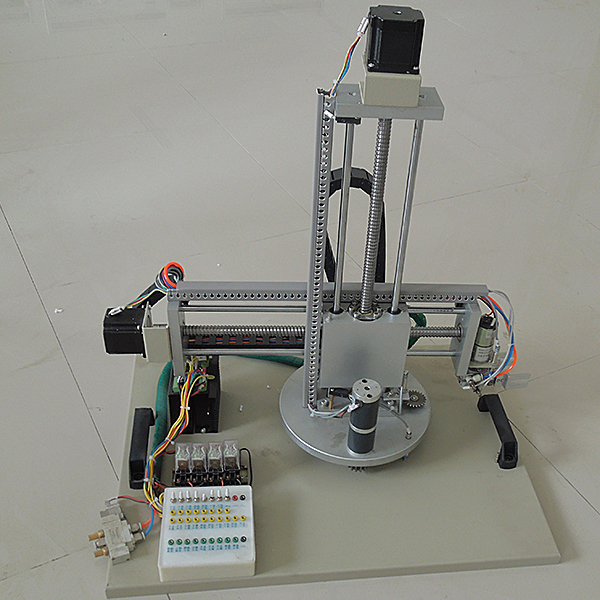
El modelo de entrenamiento del manipulador de cuatro grados de libertad es una miniatura del sistema de posicionamiento tridimensional. Está controlado por un controlador programable y acciona con precisión los motores paso a paso en las tres direcciones de los ejes X, Y y Z para transportar. y mover artículos. Es un producto terminado con perfecta ejecución. La organización puede realizar todos los procesos de acción en los sistemas logísticos modernos. A juego con Mitsubishi FX1N-40MT. El dispositivo de entrenamiento consta de una plataforma de entrenamiento con riel guía de aleación de aluminio , un dispositivo manipulador, un sistema de control, etc. El dispositivo de entrenamiento es un manipulador de coordenadas, que puede controlar con precisión la posición de rotación del manipulador, el movimiento vertical del brazo hacia arriba y hacia abajo, el movimiento horizontal del brazo y la rotación de la garra con cuatro grados de libertad. Al mismo tiempo, se configura un controlador programable PLC de tipo transistor para un control de posición complejo de todo el manipulador. La parte de control del dispositivo de entrenamiento adopta un diseño de módulo estándar y se puede dividir en módulo de potencia, módulo PLC y módulo de control del sistema. Incluye muchas tecnologías involucradas en la especialización, como motor paso a paso , transmisión mecánica, neumática , controlador programable, etc., brindando a los estudiantes un entorno de capacitación integral, de modo que muchos conocimientos profesionales de un solo tema que los estudiantes han aprendido se puedan aplicar en Aquí obtendrá una comprensión integral, una formación integral y una mejora mutua.
Parámetros técnicos
Fuente de alimentación: monofásico AC220V, 50Hz
Potencia: <200W
Tamaño: no menos de 600*400*500 mm
Estructura del equipo:
El banco del dispositivo de capacitación es de estructura metálica. Los terminales de E/S del módulo PLC del dispositivo de capacitación y evaluación y los terminales de conexión de los módulos comunes y del PLC están todos conectados a enchufes de seguridad, y se utilizan cables con enchufes de seguridad. conexión de circuito; cada interruptor de comando, Los circuitos de interruptores fotoeléctricos, sensores y elementos indicadores se conectan a través de la regleta de terminales. La combinación de circuitos de conexión de cables enchufables y extraíbles y circuitos de conexión de terminales no solo garantiza la capacitación, formación y consolidación de las habilidades básicas de los estudiantes, sino que también garantiza la velocidad, seguridad y confiabilidad de las conexiones de los circuitos.
1. Modo de control manual/automático, para detección de hardware y verificación de programas.
2. El actuador abierto se puede programar según diferentes esquemas de control para formar diferentes sistemas de ejecución, adaptándose al aprendizaje y programación del PLC por parte de personal de diferentes niveles. También se puede utilizar para el diseño de proyectos o la investigación.
3. El producto está abierto y la estructura mecánica general es claramente visible.
4. Medidas de protección de seguridad: El escritorio de la plataforma de entrenamiento está hecho de tablero de alta densidad con alto *slamiento, alta resistencia y resistencia a altas temperaturas. Tiene funciones de protección de puesta a tierra y protección contra fugas, y su seguridad cumple con las normas nacionales pertinentes. Utilice enchufes de seguridad de alto *slamiento y cables experimentales de seguridad de alta resistencia con fundas *slantes.
5. La transmisión mecánica de los ejes horizontal y vertical del manipulador adopta husillos de bolas de alta precisión, rieles guía de varilla pulida de alta precisión y cojinetes lineales, junto con un diseño mecánico avanzado , mecanizado y ensamblaje de precisión, que pueden hacer que el manipulador se mueva muy Movimiento vertical y horizontal y rotación horizontal y control de posición preciso.
6. El uso de motores paso a paso seleccionados como fuente de energía para los ejes horizontal y vertical puede lograr una subdivisión de 0,028 grados, es decir, se requieren 12.800 pasos para cada revolución y la carrera del cable de bola es de 4 mm, por lo que la precisión de desplazamiento del brazo por paso es 0,0003125 mm, el ángulo normal de un solo paso del motor paso a paso es 0,9, entonces la precisión de desplazamiento del brazo por paso es 0,01 mm.
7. La rotación horizontal del brazo robótico y la pinza es impulsada por un motor de CC de reducción avanzada, que puede lograr un control de posición preciso en la dirección de rotación.
8. La pinza mecánica adopta una pinza neumática de alta precisión, equipada con un interruptor de posición electromagnético avanzado y una válvula solenoide de tres vías y dos posiciones, que puede lograr acciones de agarre y liberación rápidas y precisas.
9. Utilizando un controlador programable PLC tipo transistor como host de control y configurando sensores, puede realizar la programación de instrucciones avanzadas de PLC y la aplicación técnica de sensores fotoeléctricos.
10. El ángulo máximo de rotación horizontal del manipulador: 720 grados.
11. La pinza mecánica adopta una pinza neumática de alta precisión, equipada con un interruptor de posición electromagnético avanzado y una válvula solenoide de tres vías y dos posiciones, que puede lograr acciones de agarre y liberación rápidas y precisas.
Contenido del experimento
1. Mecánico: instalación mecánica y ajuste de posición del dispositivo;
2. Eléctrico : cableado de componentes eléctricos, selección de motores de ejecución;
3. Sensor: selección y aplicación de microinterruptores fotoeléctricos;
4. PLC: programación y aplicación del controlador de control PLC; .
5. Experimento de control del mecanismo de alimentación
6. Experimento de control de avance lento con manipulador cruzado
7. Experimento de posicionamiento preciso tridimensional con manipulador cruzado
8. Experimento de recogida de objetos con manipulador cruzado
9. Experimento de colocación de objetos con manipulador cruzado
10. Experimento de objeto en movimiento de ciclo único con manipulador cruzado
Configuración principal (unidad única):
Nombre | modelo | cantidad | unidad | |
anfitrión del PLC | Mitsubishi FX1N-40MT (opcional) | 1 | colocar | |
cable de programación mitsubishi | USB-SC09 | 1 | banda | |
controlador paso a paso | ST-26H | 2 | colocar | |
motor paso a paso | F57 | 2 | torre | |
tornillo de avance | 1604 | 2 | raíz | |
varilla pulida | Φ10 | 4 | raíz | |
garra de *re | MHZ2-16D | 1 | individual | |
motor reductor de corriente continua | Φ37/24v a | 2 | individual | |
botón | Φ12 rojo, verde | 2 | individual | |
relé | 24V 20A | 4 | individual | |
Fuente de alimentación DC | 24V 3A | 1 | individual | |
software | Programa original del tablero de demostración y software de programación Mitsubishi. | Software de enseñanza de simulación | 1 | colocar |
Software de configuración de control industrial | ||||
manual | Instrucciones del experimento | 1 | libro | |
Línea de conexión | rojo | 5 | banda | |
negro | 5 | banda | ||
Línea verde | 10 | banda | ||
Línea amarilla | 10 | banda | ||
 微信扫码 关注我们
微信扫码 关注我们

24小时咨询热线+86 18916464525

移动电话18916464525
地址:上海市松江科技园区崇南路6号A区414号厂房 备案号: 网站地图